


* 이 글은 <로드니 브룩스의 로봇 만들기>를 읽고 쓴 글입니다.
몸이 없는 인공지능, 몸이 있는 로봇



HAL은 몸이 없다.
<2001 스페이스 오디세이>에 나오는 HAL은 인공지능 컴퓨터이다.
(자신의 판단에 따라 디스커버리 호에 있는 승무원들을 차례로 죽인다)
2016년 이세돌 9단과 바둑을 두었던 알파고도 몸이 없는 인공지능 바둑 프로그램이고,
2022년에 발표된 Chat GPT 또한 몸이 없는 인공지능 챗봇이다.
이들은 인간의 지능을 모방하였지만 인간의 육체는 모방하지 않았다.


반면에 로봇은 몸이 있다. 양감이 있다.
곤충을 닮은 로봇부터 시작해서 포유류, 인간을 닮은 로봇(휴머노이드)까지 로봇은 생체를 모방하기도 한다.
로봇이 몸을 가져야 하는 이유는 무엇일까.
그것들의 몸이 세상 안에 있다는 것은, 그리고 그것을 스스로 자각한다는 것은 어떤 의미일까.
또, 로봇이 그들의 몸으로 세상과 상호작용하려면 어떻게 해야할까.
그래서 결국, 몸이 없는 인공지능 컴퓨터와 몸이 있는 로봇의 차이는 무엇일까.
몸이 있어야 하는 이유

철학자 조지 레이코프(George Lakoff)와 마크 존슨(Mark Johnson)은
우리의 언어가 우리 몸이 세상과 상호작용하는 것에 기반을 둔다고 한다.
예를 들면,
아이가 어머니의 사랑스러운 따뜻한 품에 안겼음을 경험하였기 때문에
"아내는 남편을 따뜻이 맞아주었다"라는 표현이 생기고,
무거운 물건을 나를 때의 힘듦을 경험하여
"책임감으로 등이 휠 것 같다"라는 표현이 만들어진다.
이러한 표현들은 우리의 몸이 세상과 상호작용한 것에 기반으로 언어(메타포)가 형성이 된 것이다.
따라서
로봇이 인간과 같은 언어, 메타포, 즉 개념적인 이해를 하려면
인간의 몸이 세상과 상호작용하며 언어를 만든 것처럼
로봇이 세상과 상호작용할 몸이 존재해야 한다. 는 것을 알 수가 있다.
자신의 몸이 세상에 존재한다는 깨달음


그렇다면 그렇게 몸을 가진 로봇은 자신이 세상 안에 있는 존재라는 것을 자각할 수가 있을까?
인간의 몸을 모방한 휴머노이드 개발은 일본에서부터 활발해졌다.
1970년대 초 와세다 대학의 가토 히로카즈 교수와 연구원들은 휴머노이드 와봇(Wabot)-1을 만들었다.
몇 발자국 걸을 수 있고, 단순한 것을 손으로 잡을 수 있고, 초보적인 이야기를 사람과 나눌 수 있었다.
하지만 와봇-1은 세상 속에서 반응을 할 수 없었다.
2001년 초 혼다는 아시모(Asimo) 휴머노이드 로봇을 발표한다.
팔을 뻗고, 잡고, 걷고, 말한다.
하지만 자율적이진 못했다. 사람이 대신 조종하였다.
이 휴머노이드들은 스스로를 세상 속에서 발견하지 못하였다.
세상과의 대화

그래서 세계의 여러 연구진들은 꼭두각시에 지나지 않았던 로봇에게
감각 시스템을 만들어 주려고 하였다.
시선 방향과 그 방향을 결정하는 것은 세상과의 상호작용에 있어서 결정적인 역할을 하였다.
로봇이 세상과 상호작용을 자연스럽게 하기 위해서는 사람과 같은 시각 시스템을 갖는 것이 중요하다.
그러나 인간에게 참 쉬운 시각반응은 로봇에게는 매우 어려운 일이었다.
컴퓨터 시각은 다음과 같은 일이 어렵다. (2002년 기준)
- 대상들을 추적할 때 카메라 운동 보정하기
- 주어진 얼굴이 남성인지 여자인지 또는 젊은이인지 늙은이인지 파악, 식별
- 사람의 시선방향 정확히 결정하기
- 측면 사진을 보고 사람 알아 맞히기
- 나이 먹은 모습, 모자 쓴 모습, 면도한 모습, 수염을 기른 모습 보고 사람 알아보기
- 사람이 무엇을 입었는지 인지하기
- 보여진 사물의 물질적 속성 결정하기
- 배경으로부터 대상 분간하기
- 일반적 대상 인지하기
* 이 책 <로드니 브룩스의 로봇 만들기>는 2002년에 쓰인 책이다.
최근의 딥러닝 기술로는 위의 컴퓨터 시각 난제들을 어느 정도 풀 수 있다.
현재(2024년)의 로봇은 영상 데이터들을 통해 학습을 하고 시각 시스템을 구축한다.
(데이터로는 유튜브 영상을 사용하거나 오픈소스 영상 데이터들을 모으고 있다고 한다)
인공지능 기술은 발전하였고, 난제는 결국 풀린다.
우리는 오직 시간에 의해 제한될 뿐이고,
우리의 창조물에 더 많은 시간을 바칠수록 우리는 그것들을 더욱 훌륭하게 만들 수 있다. (133p)
몸이 있는 것과 없는 것의 차이

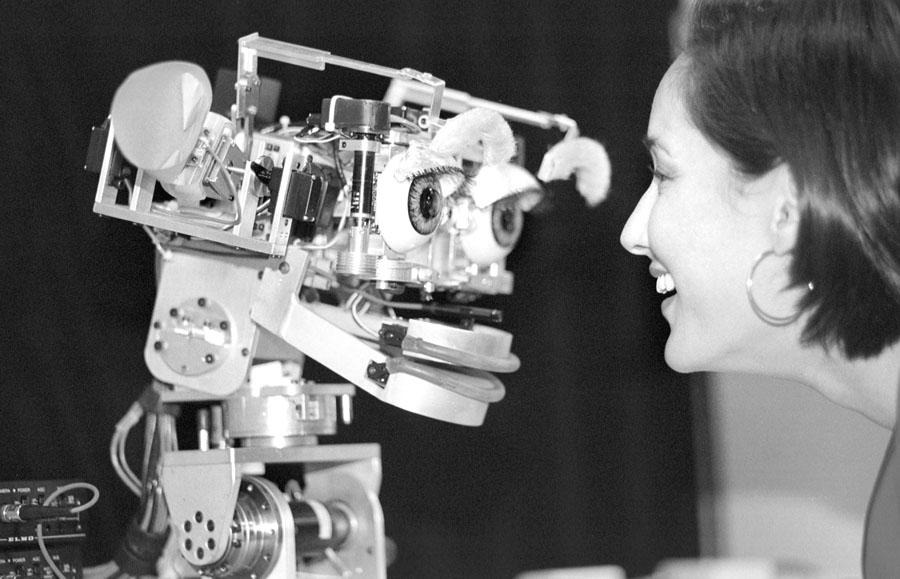
MIT의 신시아 브리질(Cynthia Breazeal)은 키스멧(Kismet)을 사교적인 로봇으로 만들기 위해
시각과 청각에 대한 반응을 구현했다.
움직이는 것, 짙은 색깔과 살색을 갖는 것에 주목할 수 있도록 시각 시스템을,
사람들이 하는 말의 운율적 특징을 찾는 청각 시스템을,
그것에 따라 정서적 상태(행복도, 흥분도, 자세)를 표정으로서 구현을 하였다.
사람들은 키스멧을 시각적으로 주목하고, 키스멧은 그들과 의사소통을 하였다.
키스멧은 자신의 내적 상태를 사람들에게 전달할 수 있었고
이를 통해 사람들과의 상호작용에 참여할 수 있게 되었다.
이것은 키스멧이 몸을 가지고 있었고,
자신을 세상에서 발견하였기에 가능했던 것이다.
HAL은 지성이었지만, 냉혹하고 엄격한 계산적인 지성이었다.
여하한 의미 있는 방식으로도 그것은 결코 우리의 친구가 될 수 없을 것이고,
그 육체를 지니지 않은 형태가 개연성 없어 보이고 불가능해 보이듯,
그것의 지성은 스스로를 어떤 다른 존재로 만들어버렸다.
HAL은 이해받을 수 없었다.
키스멧(Kismet)은 오해받을 수가 없다.
(로드니 브룩스의 로봇 만들기, 177p)
사람을 이해하고, 소통하는 사람 또한 그를 이해할 수 있는,
그래서 세상 속에서 자기 자신을 발견하는 로봇.
그리고
그 로봇으로 인해 그와 소통하는 사람이 또 다른 세상을 새롭게 발견하게 되는,
그래서 사람과 친구가 되는 로봇.
그것이 내가 만들고 싶은,
몸을 가진 로봇이다.