
"로봇을 만들어보고 싶다"는 생각은 들었지만 근래에 실천 해본적이 없었습니다.
아두이노를 배우면서 시도를 해보게 된 프로젝트입니다.
실패도 여러번 해보고;; 이것저것 구글링 자료들 들쑤셔보기도 하고 결국은 어느정도 완료했습니다.
모터 2개로 만들어보기 -> 실패
2021-08-07 ~ 2021-08-10
MAKE 잡지 책이나 유튜브를 보고 소스코드를 받아서 만들어보았으나
영상에서 보이다시피 전진조차 되지 않습니다.
제가 철사다리를 제대로 만들지 못한 점도 있고
아무래도 모터 2개만으로 움직이니 균형이나 무게중심의 문제가 생길 수밖에 없던 것 같습니다.
이 영상을 보고 쌤은 안타까워하며(ㅎㅎ;;) 모터의 개수를 늘릴 수밖에 없다 하셨습니다..
그리하여 서보모터를 알리 익스프레스에서 구매하고 이를 기다리느라 프로젝트는 잠시 중단이 됩니다.
<참고자료>
[영상]
옷걸이 철사로 다리를 단단하게 만들어서 그런지 움직이긴 합니다만 어정쩡합니다;;
[책]
http://www.yes24.com/Product/Goods/11775106
Make: 아두이노 DIY 프로젝트 - YES24
아두이노의 처음 손에 쥐었을 때부터 DIY 프로젝트를 완성할 때까지, DIY 프로젝트 전 과정에 필요한 광범위한 지식을 4도 컬러로 소개한다. 아두이노는 누구나 쉽게 시작할 수 있지만, 다양하게
www.yes24.com
위의 참고 영상 로봇도 이 책에 소개된 대로 만들어진 것입니다.
곤충로봇 말고도 다양한 프로젝트들이 소개되어 있는 책 입니다.
곤충로봇 본격적으로 만들어보기
찾다가 찾다가 유튜브에서 이 영상을 만나게 되었습니다.
사용 모터의 개수는 5개 입니다(4개는 다리, 1개는 중심축).
아두이노 프로 미니를 사용하였으며,
3개의 초음파 센서, 4개의 포토다이오드가 연결되어 있고 전원공급은 보조배터리를 이용하였습니다.
이전에 보았던 곤충로봇보다 훨씬 안정감이 있고
센서를 통해 거리에 따라 움직임을 뒤로 하거나 빛을 따라 다니다거나 하는 기능을 구현하였기에
관심이 쏠리게 되었습니다.
[사이트]
http://chaoticvoltage.blogspot.com/2016/12/walter-arduino-insect-robot.html
WALTER - The Arduino Insect Robot
[Please excuse my English] I really like the popular set-up of 2 servos arduino insects on youtube. When I looked at it, I always...
chaoticvoltage.blogspot.com
원작자 블로그에 이 로봇을 어떻게 만들었는지 자세하게 설명되어 있습니다.
소스코드도 공개하였고요. 참고하면 됩니다.
<개발일지>
1. 일단 브레드보드에
서보모터가 알리에서 도착을 하였고
일단 브레드보드에 모터와 센서들을 연결을 하고 원작자의 소스코드를 업로드 해보았습니다.
먼가 되는 것 같긴 한데, 이걸 어떤 구조로 어떻게 만들어야 하는지 감이 안 와서 고생하였습니다;;
소스코드도 원작자가 친절하게 주석을 달아주었으나 이해가 되지가 않고요;;
납땜, 전원 공급을 해야 합니다.
납땜은 초딩 때 실과시간에 잠깐 하다가 인두기에 데인 기억밖에 없고. ㅎㅎ
전원 공급은.. 걍 원작자처럼 보조배터리 쓰면 되지 않나 대충 생각하고. ㅎㅎ
2. 전원 공급
5V 전원을 주는 것이 관건입니다.
쌤 말씀으론
(1) 어댑터에서 끌어와야한다
12볼트 어댑터에서 5볼트로 강압 step down을 하는 것이 제일 쉽다고
step down converter
결국 납땜을 해야 한다는 말
(2) 아님 모듈을 사용해야 한다
7805 모듈을 써야하지만 옴의 법칙에 의해 열이 많이 발생한다고.
알리익스프레스_7805모듈
1516.0₩ 10% OFF|LM7805 LM7809 LM7812 DC/AC 3 단자 전압 조정기 전원 공급 장치 모듈, 5V 9V 12V 출력 최대 1.2A
Smarter Shopping, Better Living! Aliexpress.com
ko.aliexpress.com
듣고서 여튼 제 스스로 어찌어찌 하려고 노력합니다.
안정적인 전원을 공급하여 서보모터 5개가 정상적으로 동작하는 것이 목표.
나중에는 결국 그냥 원작자처럼 보조배터리를 이용하였습니다 ㅋ.
3. 납땜의 세계
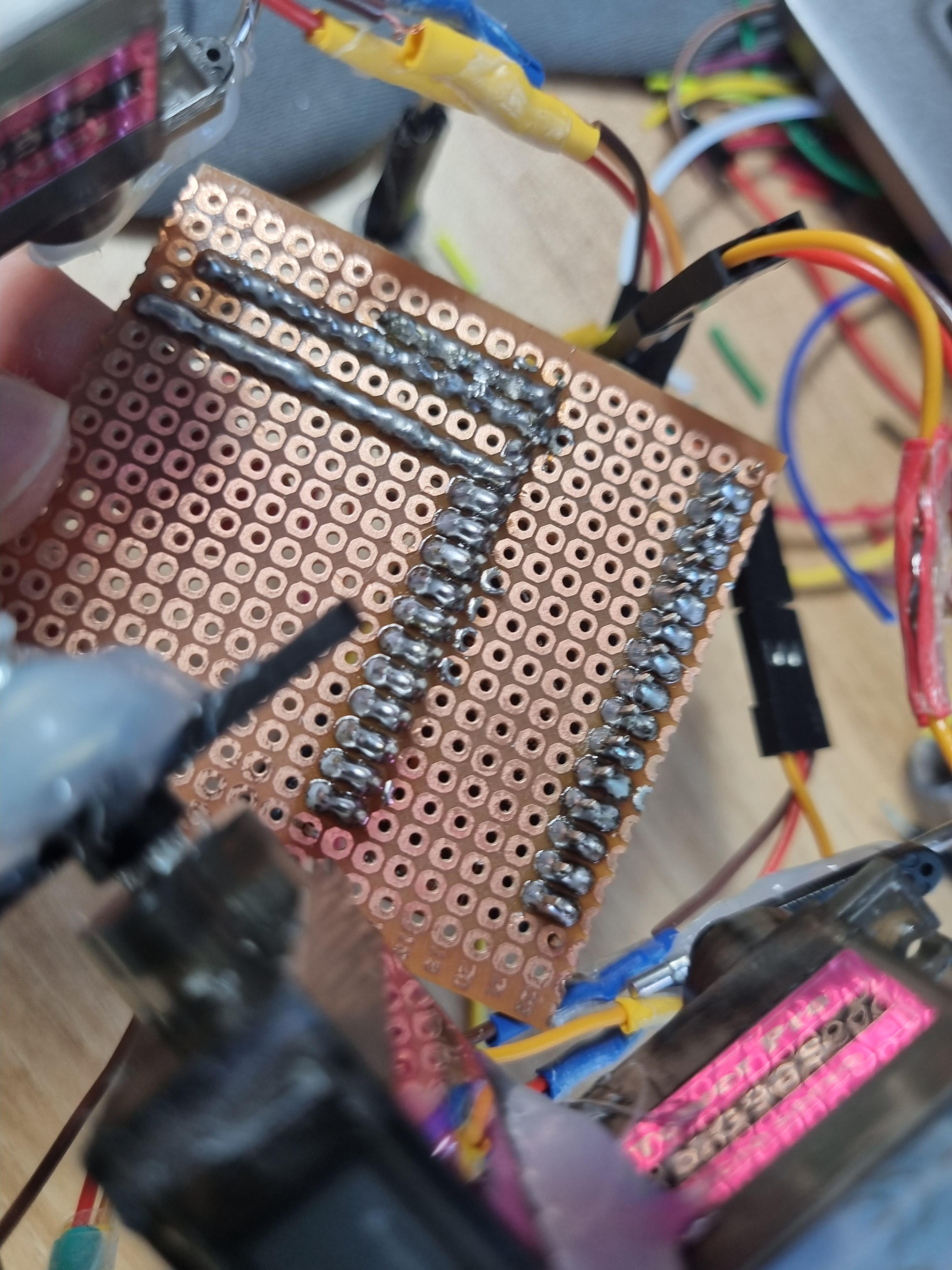
처음 납땜기를 알리에서 받고
싸구려 만능기판에 처음 줄부터 끝 줄까지 구멍메우기를 3장 해보았습니다.
얼추 익숙해져서 나중에 위에 사진과 같이 납땜함.
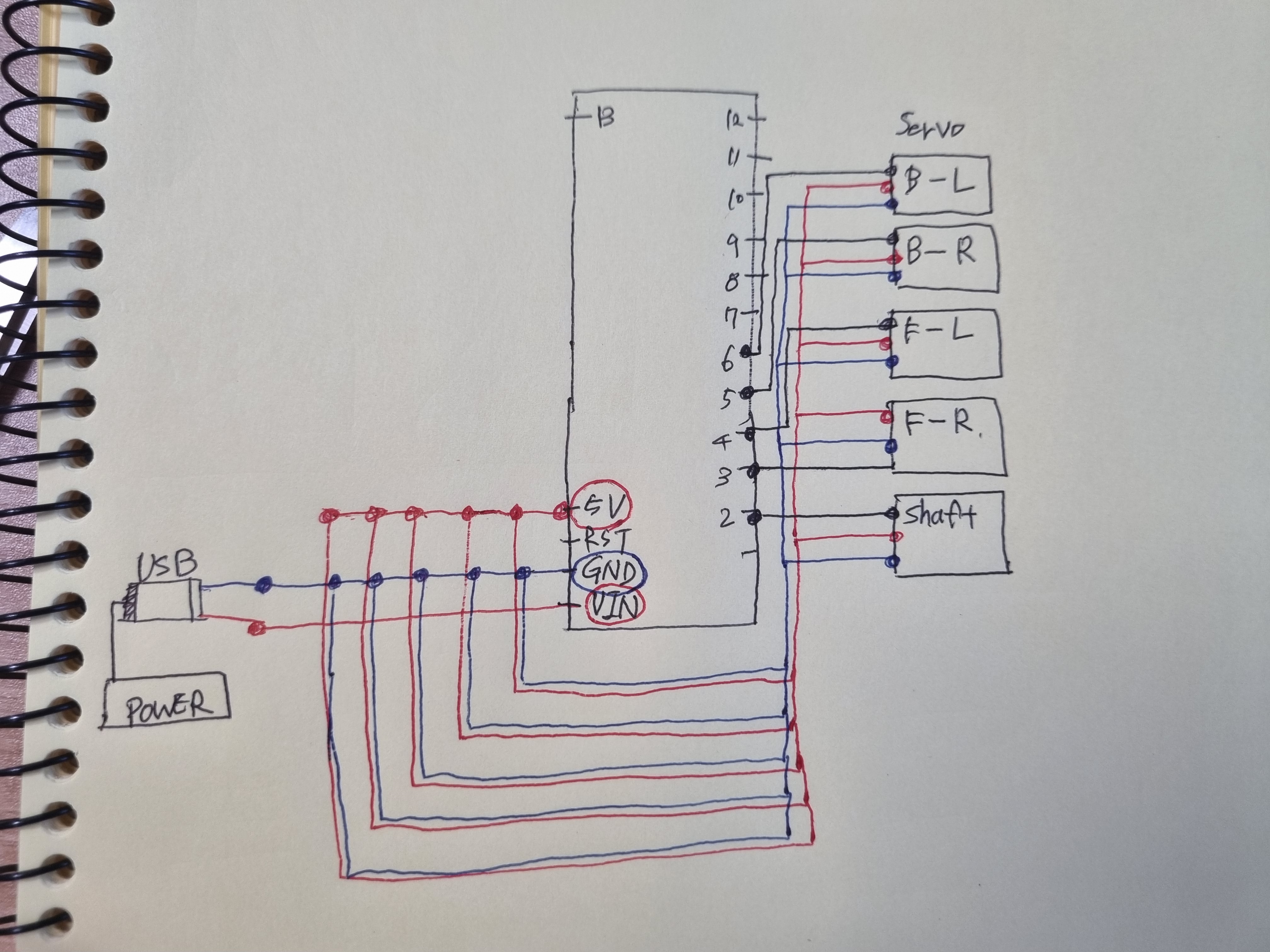
회로도 아닌 회로도를 대략 그려서 쌤한테 피드백 받았습니다.
저는 만능기판에 헤더핀을 사용했는데 더 좋은 방법이 있을겁니다.
이때 모터 하나가 제대로 동작을 안해서 쌤한테 회로도 카톡으로 보낸 것인데
알고보니 케이블 전선의 길이를 줄이면서 납땜한 부위가 불량이라 그랬던 것..
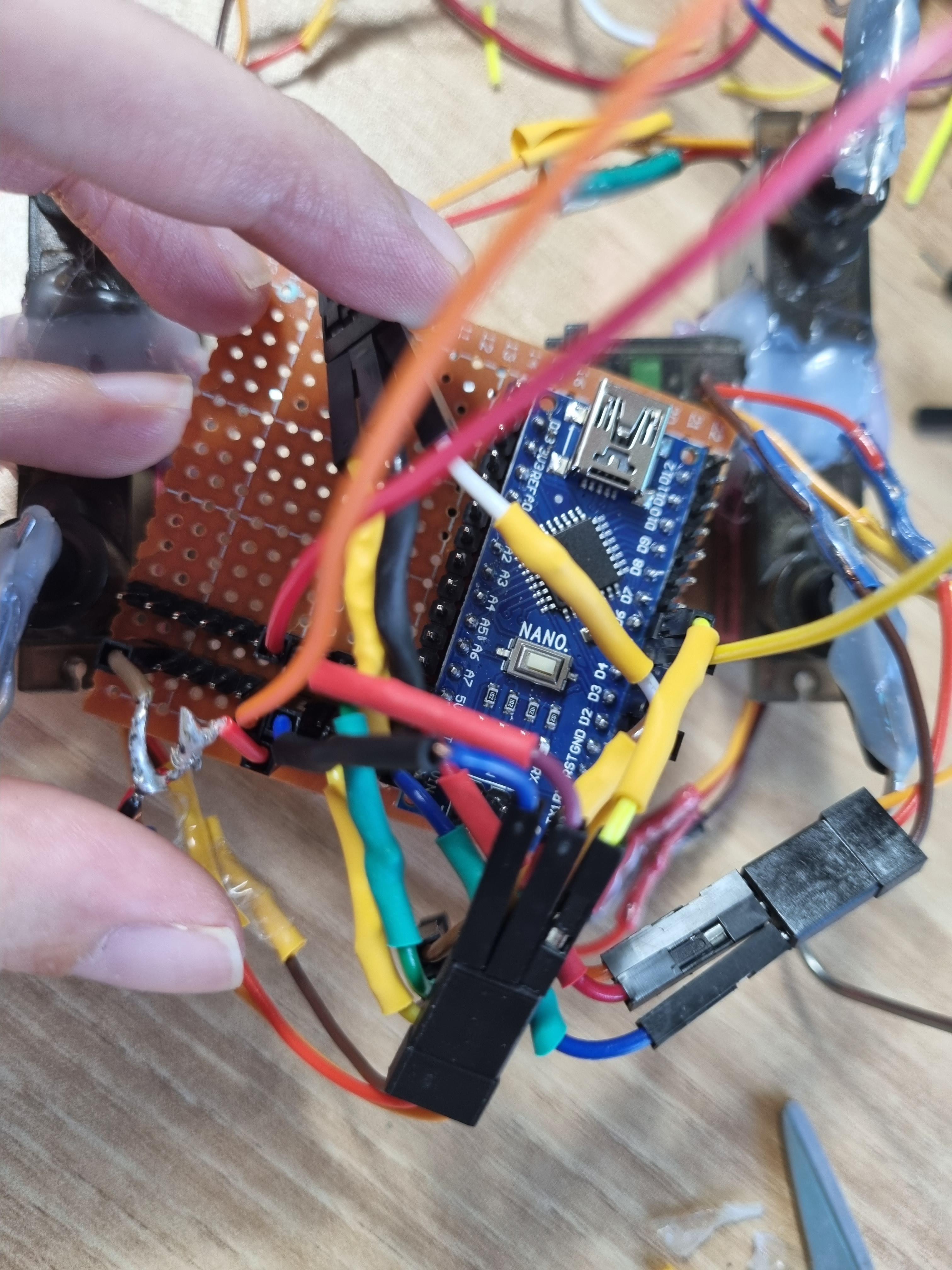
전선 길이를 줄이기 위해 납땜하고 히팅건 사용해서 열수축 튜브로 고정하는 반복작업
(역시나 더 좋은 방법이 있을겁니다)
추석 연휴는 납땜과 함께 ㅎㅎ
4. 완료

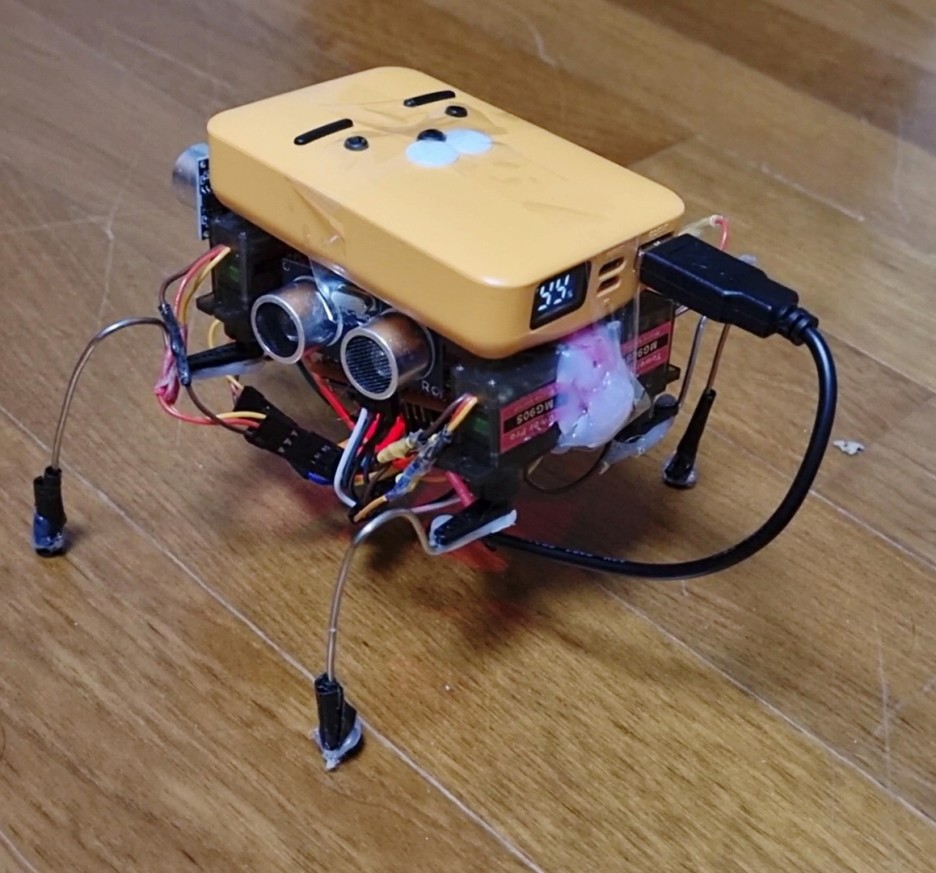
저 라이언 보조배터리는 종종 필요해서
글루건으로 완전히 고정을 시키지 않고 테이프로 대충 붙였습니다.
잘 움직이는 것을 보고 만족.
초음파 센서 정상 작동합니다.
손으로 갖다대면 피함
포토 다이오드는 귀찮기도 하고 이미 만능기판 핀헤더 연결부위가 포화상태라 달지 않았습니다.
무게중심이 안맞아서 텀블링을 하기도 합니다
...데드 버그
(쌤은 배터리 부족할 때 이 동작 하도록 하면 좋겠다고 하심)
3D 프린터로 케이스 만들기
2022-04-25 ~ 2022-05-14
2022년 4월 초에 Anet A8 3D 프린터를 구입 후 조립을 하였습니다.
3D 모델링 프로그램인 솔리드웍스 메이커용 버전 또한 월정액으로 구입을 하였으며
이것저것 배우고서 작년에 만든 곤충로봇이 생각이 나서 케이스를 만들어주기로 합니다.
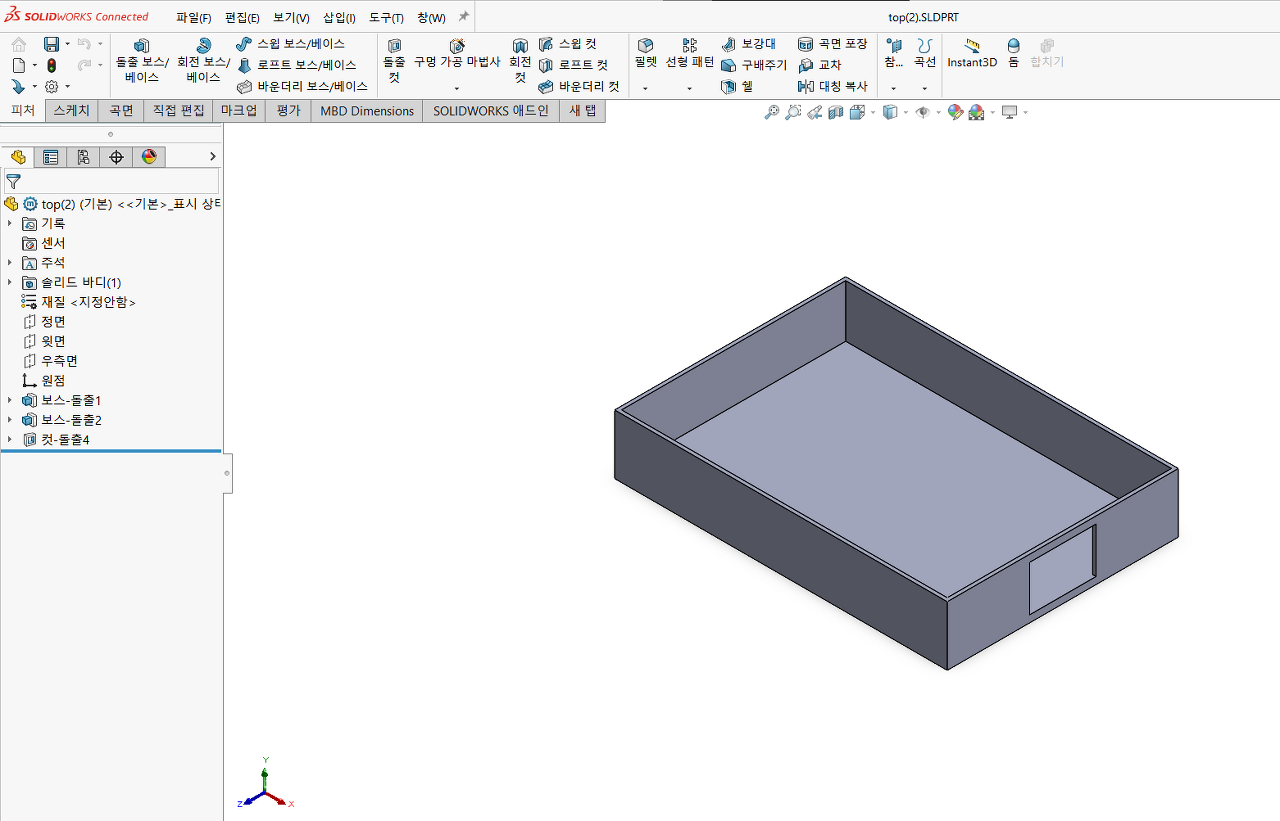

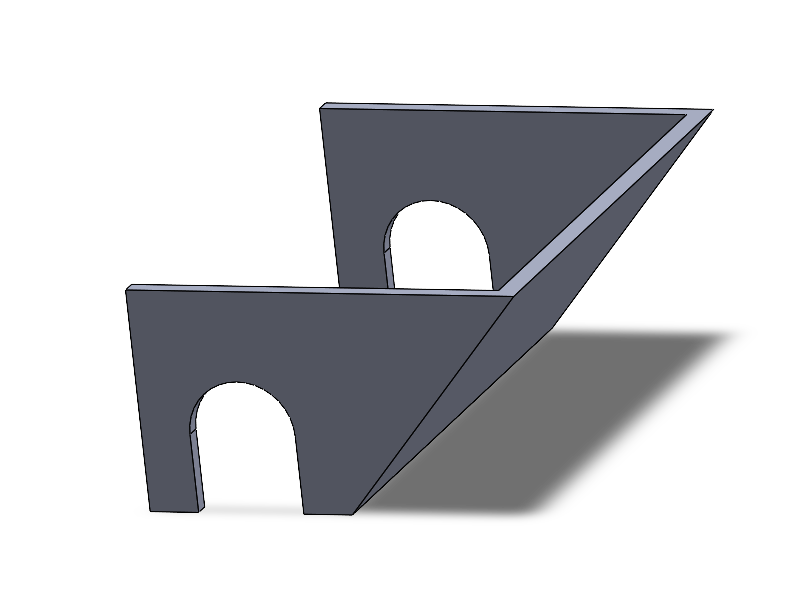
버니어 캘리퍼스로 측정을 한 뒤 3D 모델링을 합니다.
모델링 후 슬라이서 프로그램을 이용하여 모델링 한 stl 파일을 gcode로 변환 후 3D 프린터로 출력을 합니다.
출력 후 조립 완성
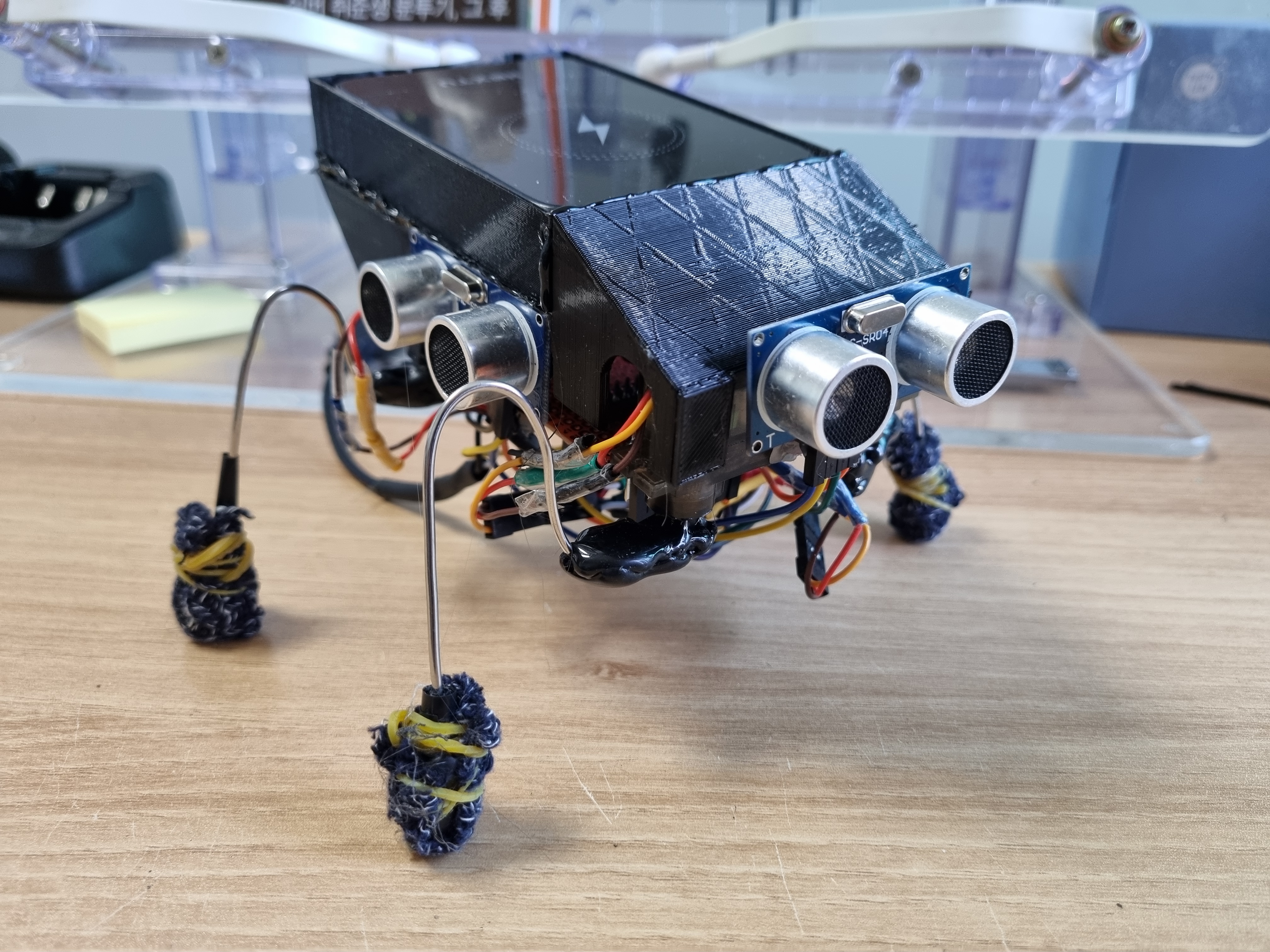
배터리는 좀 더 가볍고 작은 것을 찾아서 장착 하였고
발 부분은 양말을 잘라서 감싸 고무줄로 고정시켰습니다.
케이스가 검정색이라 검정심 글루건을 이용하여 붙였습니다. (냄새가 너무 심했음;;)
예전처럼 텀블링을 하지 않게 하기 위해 보조배터리를 뒤로 놓았더니
무게중심 문제로 뒤로는 잘 움직이는데 앞으로 잘 움직이지를 못합니다.
아쉽지만 여기까지.. (내 능력의 한계)
꼬리(USB 케이블)가 달려서 엄밀히 말해 곤충로봇은 아닌듯 ㅋㅋ.
마치며
고딩 때 대충 강아지 로봇 만들고서부터 다시 처음으로 로봇을 만들어보니 감회가 새롭습니다.
원작자의 잘 소개된 영상과 글들을 유심히 살펴보고 만들 수 있게 되었습니다.
(블로그 이름이 CHAOTIC VOLTAGE 혼돈전압?)
yohanes martedi 님 감사합니다.
또한 가이드 해주신 쌤께도 감사드립니다.
납땜도 새로 해보고, 글루건으로 기구부도 만들어보고.. 나중엔 3D 프린터로 케이스까지..
쌤 말씀으론 코딩(소프트)이 20이고 기구(하드) 만드는게 80이라 하심.. 몸소 느꼈습니다.
만드는 동안 재미있고 즐거웠습니다.
(쌤께서 아두이노 나노에서 메가로 교체하고 스피커, led 등을 추가해보라 하였으나 귀차니즘으로...)
다음 로봇 계열 프로젝트로는
제가 능력만 된다면 꾹꾹이 로봇을 만들고 싶네요.
(저희 집 고양이 꾹꾹이)
끝.